Camera
Pose Refinement for City-Scale
Visual Positioning Systems
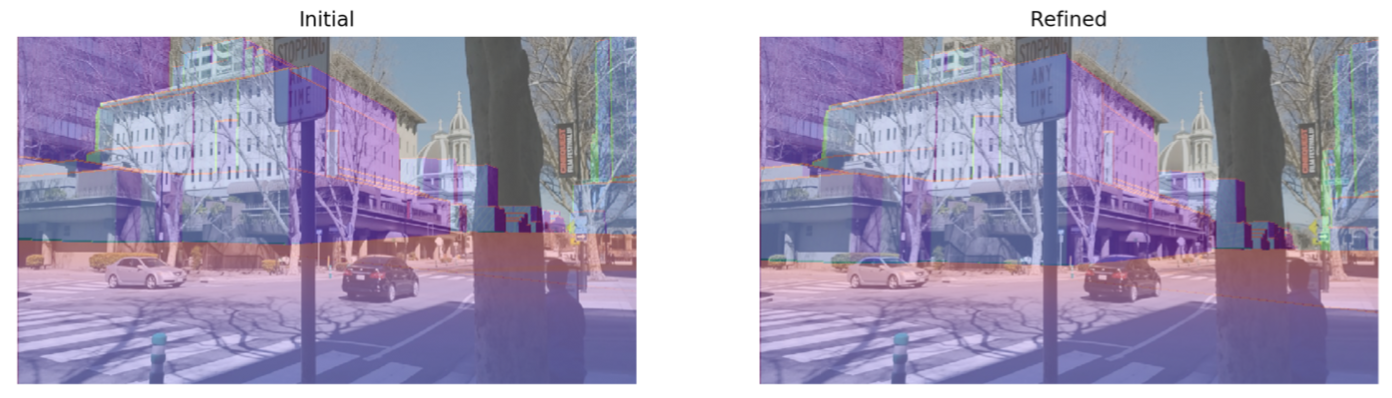
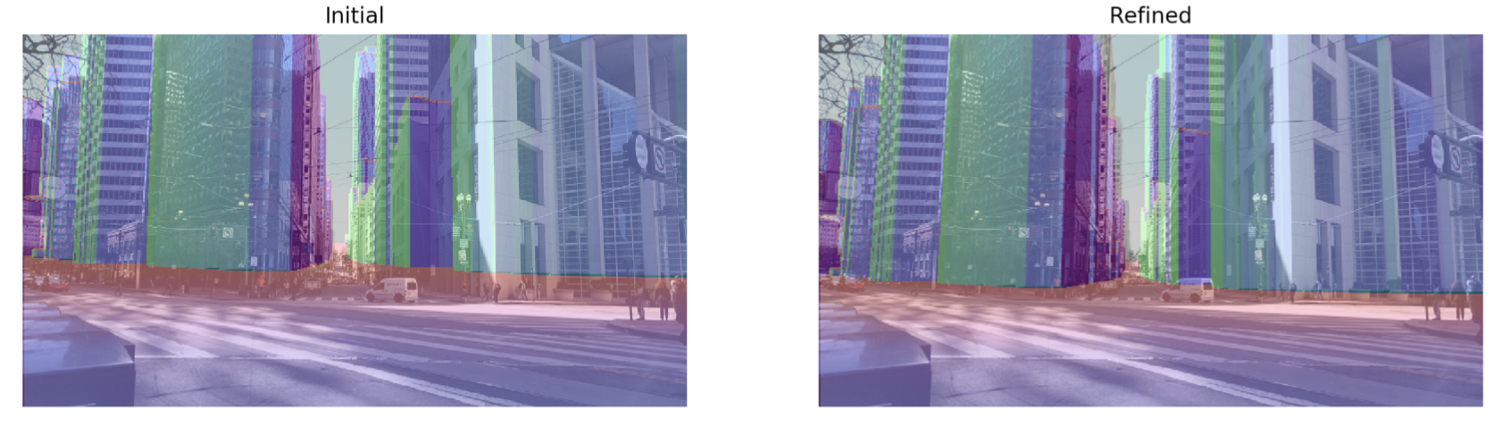
Given a low level of detail city model and the initial camera pose estimate of an image, the task is to find a more accurate pose. We develop a simple yet effective
pose refinement approach utilizing image features and rendering based on intial pose. The approach is applied to large
scale visual positioning systems and signficiantly improves
localization accuracy in a multi-city benchmarking dataset. Several examples are presented below, showing that model rendering and
images are much better aligned after our pose refinement approach.
Please address questions
to jiangye07-at-gmail.com